
www.engineering-thailand.com
14
'22
Written on Modified on
HMS Industrial Networks: Keep Moving เพื่อให้หุ่นยนต์โมบายสามารถเดินหน้าต่อไป
ความท้าทายด้านการสื่อสารและความปลอดภัย ที่ผู้ผลิตหุ่นยนต์โมบาย กำลังเผชิญ.

เราสามารถพบเห็นหุ่นยนต์โมบายได้ทั่วไป ตั้งแต่คลังสินค้า ไปจนถึงโรงพยาบาล แม้แต่ตามถนนหนทาง หุ่นยนต์พวกนี้ได้รับความนิยม เพราะว่ามีราคาถูก ปลอดภัย และหาซื้อง่าย และที่สำคัญ มันทำงานได้ประสิทธิภาพมากกว่าแรงงานคน ทั้งยังง่ายต่อการขยายจำนวน หรือทำงานร่วมกับหุ่นยนต์อื่นๆ เนื่องจากหุ่นยนต์เหล่านี้ สามารถเก็บข้อมูลแบบเรียลไทม์ได้จำนวนมาก บริษัท หรือภาคอุตสาหกรรม สามารถใช้หุ่นยนต์โมบาย เป็นจุดเริ่มต้นสำหรับการเดินหน้าโครงการ IIoT ของตน
แต่หากจะให้การทำงานของมันมีประสิทธิภาพ หุ่นยนต์โมบายเหล่านี้ต้องการการสื่อสารที่มีความน่าเชื่อถือและปลอดภัยสูง บทความนี้ จะแสดงให้เห็นถึงความท้าทายสำคัญๆ ด้านการสื่อสารและความปลอดภัย ที่ผู้ผลิตหุ่นยนต์โมบายกำลังเผชิญอยู่ และยังนำเสนอทางออกที่ง่าย ที่จะเอาชนะความท้าทายเหล่านี้ เพื่อให้หุ่นยนต์โมบายสามารถเดินหน้าต่อไป
หุ่นยนต์โมบาย คืออะไร?
ก่อนอื่น เราจะนิยามความหมายของหุ่นยนต์โมบาย กันก่อน
หุ่นยนต์โมบาย หรือหุ่นยนต์ที่มีความสามารถในการเคลื่อนที่ มันเป็นยานพาหนะสำหรับขนถ่ายวัสดุสิ่งของ จากที่หนึ่งไปยังอีกที่หนึ่ง ซึ่งมีด้วยกันสองประเภท คือ AGV (automated guided vehicles) ยานพาหนะที่ใช้ระบบนำทางอัตโนมัติ และ AMR (autonomous mobile robots) หุ่นยนต์เคลื่อนที่ได้ด้วยตัวเอง โดย AGV จะอาศัยอินฟาสตรักเจอร์ของระบบนำทาง (อุปกรณ์ไวร์รีเฟล็กเตอร์ รีเฟล็กเตอร์ หรือ แถบแม่เหล็ก) สำหรับการเคลื่อนที่ไปตามเส้นทางที่ระบบกำหนดให้ หากมีอะไรมากีดขวางเส้นทาง AGV จะหยุดทันที และรอจนกว่าสิ่งกีดขวางนั้นจะถูกเคลื่อนย้ายออกไป
ส่วน ARM จะสามารถเคลื่อนที่ได้คล่องแคล่วกว่า มันเคลื่อนที่โดยอาศัยแผนที่ ที่ใช้ข้อมูลจากกล้องถ่ายภาพ ร่วมกับเซนเซอร์แบบบิลท์อิน หรือใช้เลเซอร์สแกนเนอร์ เพื่อตรวจจับสิ่งที่อยู่รายล้อม แล้วประมวลผลและเลือกเส้นทางที่ดีที่สุด หากมีอะไรมากีดขวางเส้นทาง ARM มันก็จะเปลี่ยนไปใช้เส้นทางอื่น เนื่องจาก ARM ไม่ต้องพึงพาอินฟาสตรักเจอร์สำหรับระบบนำทาง มันจึงสามารถติดตั้งได้รวดเร็วกว่า และยังปรับเปลี่ยนไปตามสภาพของเส้นทางโลจิสติกได้เร็วกว่าอีกด้วย
ความท้าทายด้านการสื่อสารและความปลอดภัย ที่ผู้ผลิตหุ่นยนต์โมบายกำลังเผชิญ มีอะไรบ้าง?
1 การติดตั้งระบบเชื่อมต่อไวร์เลส ที่น่าเชื่อถือ
ความท้าทายแรกของผู้ผลิตหุ่นยนต์โมบาย คือการเลือกเทคโนโลยีไวร์เลสที่เหมาะสมที่สุด ซึ่งคำแนะนำทั่วไปคือ ต้องกำหนดความต้องการ นำมาตรฐานต่างๆ มาร่วมประเมิน แล้วเลือกตัวที่เข้ากันกับลักษณะของงานได้มากที่สุด แต่ในความเป็นจริงแล้ว ไม่ใช่ว่าผู้ผลิตหุ่นยนต์โมบายทุกรายจะสามารถทำได้ผลเสมอไป เนื่องจากพวกเขาไม่รู้ว่า ควรจะติดตั้งหุ่นยนต์ที่ตรงไหน หรือ ไม่เข้าใจว่า แอพพลิเคชั่นที่ต้องการใช้มีรายละเอียดอะไรบ้าง
หรือบางครั้ง การเชื่อมต่อผ่านบลูทูธก็เป็นทางเลือกที่สมบูรณ์แบบ เนื่องจากเป็นการเชื่อมต่อที่เสถียรและไม่เกิดปัญหาความคับคั่งของเน็ตเวิร์ค แต่ในบางการใช้งาน อาจต้องการการเชื่อมต่อระบบเซลลูลาร์ที่มีความเร็วของการส่งถ่ายข้อมูลและความเสถียรสูงสุด แต่สิ่งที่จะเป็นประโยชน์สำหรับผู้ผลิตหุ่นยนต์โมบายอย่างแน่นอน คือการมีเทคโนโลยีเน็ตเวิร์ค ที่ง่ายต่อการปรับเปลี่ยนให้เหมาะกับความต้องการเฉพาะด้าน
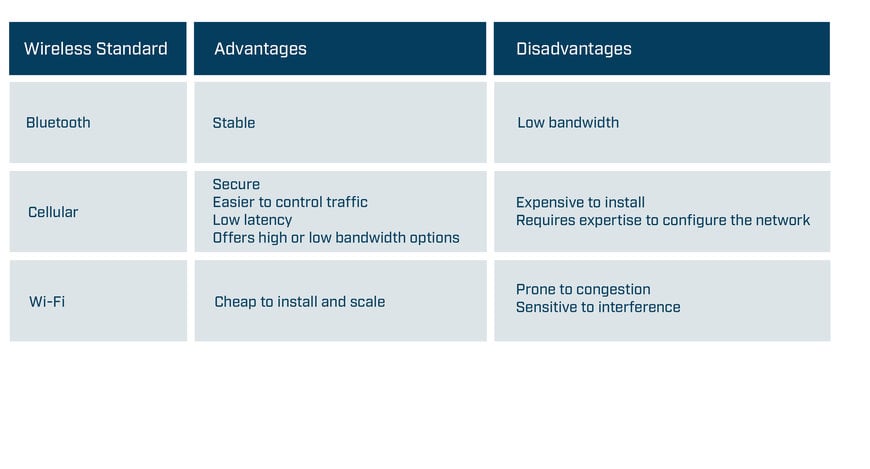
มาตรฐานไวร์เลส ที่มีข้อได้เปรียบอย่างมาก ขณะเดียวกันก็มีข้อด้อยไม่น้อยเช่นกัน
ความท้าทายที่สอง คือ ทำอย่างไรจะมั่นใจว่าในการติดตั้ง หุ่นยนต์จะทำงานได้ตามที่วางแผน ก่อนทำการติดตั้งโซลูชั่นไวร์เลส ท่านจะต้องทำการสำรวจไซต์งานตามแบบแปลนของสถานที่ให้เรียบร้อย เพื่อให้มั่นใจว่า หุ่นยนต์โมบายจะมีสัญญาณที่ครอบคลุมทั่วทั้งสถานที่ ในการสำรวจไซต์งาน ควรจะต้องระบุ หรือกำหนดจุดที่ดีที่สุดสำหรับใช้เป็นแอ็กเซสพอยต์ (access points) ใช้เสารับส่งสัญญาณที่ถูกประเภท และติดตั้งมันให้ได้องศาที่เหมาะที่สุด รวมถึง การลดสัญญาณรบกวนให้เหลือน้อยที่สุด หลังการติดตั้ง ให้ใช้เครื่องดักจับสัญญาณ ทำการตรวจเช็คตามการออกแบบ และปรับแอ็กเซสพอยต์ หรือเสารับส่งสัญญาณ หากจำเป็น
2 การเชื่อมต่อหุ่นยนต์โมบาย เข้ากับเน็ตเวิร์คอุตสาหกรรม
หุ่นยนต์โมบาย จำเป็นต้องสื่อสารกับคอนโทรลเลอร์ของไซต์งาน ถึงแม้ว่าโดยทั่วไปแล้ว หุ่นยนต์โมบายและคอนโทรลเลอร์ จะใช้โปรโตคอลอุตสาหกรรมที่แตกต่างกัน ยกตัวอย่าง เช่น AGV ใช้โปรโตคอล CANopen ขณะที่ตัวคอนโทรลเลอร์ใช้ PROFINET ยิ่งกว่านั้น ผู้ผลิตหุ่นยนต์โมบาย อาจต้องการใช้หุ่นยนต์ AGV รุ่นเดียวกันทั้งหมดในไซต์งานต่างๆ ในขณะที่ บางไซต์งานมีระบบควบคุมที่ใช้โปรโตคอลอื่น เช่น EtherCAT
ผู้ผลิตหุ่นยนต์โมบายยังต้องมั่นใจว่า หุ่นยนต์โมบายของพวกเขามีศักยภาพเพียงพอ ที่ประมวลผลข้อมูลในปริมาณตามที่ผู้ใช้ต้องการ ซึ่งปริมาณข้อมูลนี้ จะขึ้นกับขนาดและประเภทของการติดตั้ง สำหรับการติดตั้งหุ่นยนต์จำนวนมากๆ อาจต้องใช้ข้อมูลมากกว่า เนื่องจากอัลกอริธึมของการออกแบบเส้นทาง จะต้องครอบคลุมพื้นที่ขนาดใหญ่กว่า ยิ่งมีจำนวนหุ่นยนต์มาก ก็ยิ่งมีเส้นทางมากขึ้นตาม ส่วนระบบนำร่อง เช่น ระบบนำร่องที่ใช้ระบบวิชั่น ระบบจะต้องประมวลภาพจำนวนมาก ดังนั้นมันจึงต้องการกำลังของหน่วยประมวลผลที่สูงกว่า ระบบนำร่องประเภทอื่น เช่น ระบบที่ใช้รีเฟล็กเตอร์ ดังนั้น จึงอาจสรุปได้ว่า ผู้ผลิตหุ่นยนต์โมบาย จะต้องแก้ปัญหาและความท้าทาย ต่อไปนี้
- พวกเขาต้องการเทคโนโลยีเน็ตเวิร์ค ที่สามารถสนับสนุนฟิลด์บัสหลักๆ และเน็ตเวิร์คอุตสาหกรรม Ethernet ได้
- ระบบจะต้องง่ายและเอื้อต่อการปรับเปลี่ยนเทคโนโลยีเน็ตเวิร์ค เพื่อให้หุ่นยนต์โมบายสามารถสื่อสารกับคอนโทรลเลอร์ ด้วยเน็ตเวิร์คอุตสาหกรรมเดียวกัน โดยไม่ต้องเปลี่ยนการออกแบบทางฮาร์ดแวร์
- พวกเขาต้องการความมั่นใจว่า เทคโนโลยีเน็ตเวิร์ค มีศักยภาพและฟังก์ชันเพียงพอ สำหรับประมวลผลข้อมูลในปริมาณที่ผู้ใช้ต้องการ
3 การสร้างระบบที่ปลอดภัย
การสร้างระบบ ที่หุ่นยนต์โมบายสามารถขนถ่ายวัสดุได้อย่างปลอดภัย มีความสำคัญอย่างยิ่ง แต่มันก็เป็นภาระกิจที่ท้าทาย ผู้ผลิตหุ่นยนต์โมบายจำเป็นต้องสร้างระบบ ที่พิจารณาถึงปัจจัยต่างๆ ทั้งประเภทของหุ่นยนต์ โครงสร้าง และคนทำงานที่อยู่ในสภาพแวดล้อมนั้น พวกเขาต้องมั่นใจว่า หุ่นยนต์โมบายจะตอบสนองต่อการกระทำที่มาจากภายนอก เช่น เมื่อมีพนักงานเปิดประตูฉุกเฉิน หรือกดปุ่มฉุกเฉิน ซึ่งโซลูชั่นเน็ตเวิร์คที่ใช้ จะต้องประมวลโปรโตคอลและอินเตอร์เฟสด้านความปลอดภัย พวกเขาต้องพิจารณาว่า หุ่นยนต์ ARM จะเคลื่อนที่ได้อย่างอิสระและสามารถจัดการกับความเสี่ยงจากการชนได้ นอกจากนี้ เทคโนโลยีตัวเซ็นเซอร์ มักมีความเปลี่ยนแปลงอย่างรวดเร็ว ดังนั้น ผู้ผลิตหุ่นยนต์โมบายจำเป็นต้องคอยติดตามความก้าวหน้า เพื่อให้หุ่นยนต์ที่ตนผลิต มีประสิทธิภาพสูงที่สุดเท่าที่จะเป็นได้
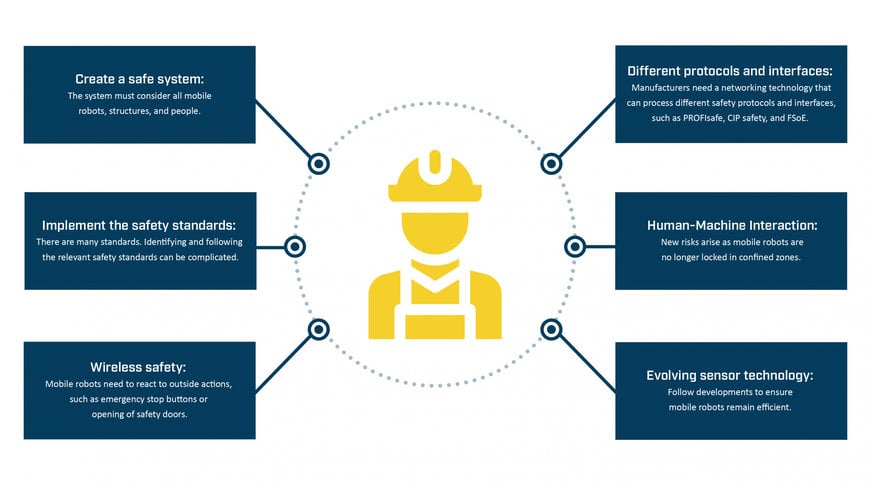
ภาพรวมของความท้าทายด้านความปลอดภัย สำหรับผู้ผลิตหุ่นยนต์โมบาย
มาตรฐานความปลอดภัย
มาตรฐานความปลอดภัย เป็นแนวทางในการนำเอาองค์ประกอบต่างๆ ด้านความปลอดภัยไปสู่การปฏิบัติอย่างเป็นระบบ รวมถึง การเตรียมสภาพแวดล้อม และการบำรุงรักษาเครื่องจักรและอุปกรณ์ต่าง ๆ
ในขณะที่การสอดคล้องต่อมาตรฐานความปลอดภัยต่างๆ เช่น ISO, DIN, IEC หรือ ANSI ส่วนใหญ่จะเป็นความสมัครใจ แต่สำหรับผู้ผลิตเครื่องจักรในสหภาพยุโรป มันเป็นข้อบังคับทางกฎหมาย ที่จะต้องปฏิบัติตามมาตรฐานความปลอดภัยในข้อบังคับว่าด้วยเครื่องจักรกล คือ Machinery directive 2006/42/EC และในบางลักษณะงาน ยังต้องสอดคล้องกับข้อบังคับ directive 2014/30/EU ที่ว่าด้วยการควบคุมคลื่นแม่เหล็กไฟฟ้าของอุปกรณ์อีกด้วย โดย Machinery directive 2006/42/EC จะอธิบายถึงข้อกำหนด สำหรับการออกแบบและสร้างเครื่องจักรกล ที่ปลอดภัยสำหรับตลาดในประเทศสหภาพยุโรป ผู้ผลิตจะสามารถปิดฉลากเครื่องหมาย CE บนเครื่องจักรของตนแล้วจัดส่งไปยังลูกค้าได้ ก็ต่อเมื่อสามารถพิสูจน์ในแบบรับรองตนเองของผู้ประกอบการว่า ได้ผ่านกฎเกณฑ์ต่างๆ ที่ระบุเป็นข้อกำหนดในข้อบังคับดังกล่าว อย่างครบถ้วนสมบูรณ์เท่านั้น
ถึงแม้ว่ามาตรฐานความปลอดภัยอื่นๆ จะไม่ได้เป็นข้อบังคับ แต่ผู้ประกอบการผลิตก็ควรปฏิบัติตาม เพราะว่ามันจะช่วยให้พวกเขาผ่านการรับรองตามข้อบังคับ Machinery directive 2006/42/EC ได้ง่ายขึ้น เช่น ผู้ผลิตปฏิบัติตามแนวทาง ISO 12100 เพื่อลดความเสี่ยงที่ได้ระบุ ให้เหลือเพียงระดับที่ยอมรับได้ พวกเขาสามารถใช้ ISO 13849 หรือ IEC 62061 เพื่อหาระดับความปลอดภัยที่จำเป็นสำหรับแต่ละความเสี่ยง และเพื่อให้มั่นใจว่าฟังก์ชันความปลอดภัยสอดคล้องตามข้อกำหนด ผู้ผลิตหุ่นยนต์โมบายต้องพิจารณาเองว่า พวกเขาจะสามารถบรรลุเป้าหมายความปลอดภัยได้อย่างไร ยกตัวอย่าง เช่น พวกเขาอาจลดความเร็วของหุ่นยนต์โมบายลง เพื่อลดความเสี่ยงจากการชนและความรุนแรงของการบาดเจ็บ ไปสู่ระดับที่ยอมรับได้ หรือ พวกเขาจะทำให้มั่นใจได้ว่า หุ่นยนต์จะทำงานในพื้นที่แยกส่วนเท่านั้น ซึ่งเป็นพื้นที่ห้ามคนเข้าไป (พื้นที่อับตามมาตรฐาน ISO 3691-4)
การเลือกมาตรฐานที่ถูกต้องและการนำข้อกำหนดของมันไปสู่การปฏิบัติ เป็นวิธีที่ดีที่สุดที่ผู้ผลิตหุ่นยนต์โมบายจะสามารถสร้างระบบความปลอดภัย แต่อย่างที่กล่าวไว้ในบทสรุปว่า มันเป็นกระบวนการทำงานที่ซับซ้อน และสิ้นเปลืองเวลามาก
4 การรับประกันว่า มีมาตรฐานการสื่อสาร CAN ที่น่าเชื่อถือ
เทคโนโลยีการสื่อสาร CAN ซึ่งเป็นมาตรฐานที่น่าเชื่อถือและง่ายต่อการนำไปใช้งาน ตั้งแต่ทศวรรษ 1980s ยังคงได้รับความนิยมเพิ่มขึ้นเรื่อยๆ สาเหตุหลักมาจากมันถูกใช้ในอุตสาหกรรมที่หลากหลายและเป็นอุตสาหกรรมที่กำลังบูม เช่น ระบบขับเคลื่อนด้วยพลังงานไฟฟ้า (E-Mobility) ระบบกักเก็บพลังงานแบบแบตเตอรี่ (BESS) เทคโนโลยีสื่อสาร CAN มีการทำงานที่ง่าย คุ้มราคา และประหยัดพลังงาน อุปกรณ์ทุกตัวบนเน็ตเวิร์คสามารถเข้าถึงข้อมูลได้ทั้งหมด และมันยังเป็นมาตรฐานเปิด หมายความว่า ผู้ใช้สามารถปรับหรือดัดแปลงและขยายจำนวน เพื่อให้ตอบโจทย์ความต้องการของตน
ผู้สำหรับผู้ผลิตหุ่นยนต์โมบาย การวางระบบเชื่อมต่อด้วยเทคโนโลยีการสื่อสาร CAN กลายเป็นส่วนสำคัญอย่างยิ่ง เนื่องจากมันทำให้พวกเขา สามารถมอนิเตอร์สถานะของแบตเตอรี่ลิเธียมอิออน ที่กำลังใช้กันมากขึ้นในระบบขับเคลื่อนของหุ่นยนต์โมบาย ไม่ว่าจะเป็นการรีโทรฟิตระบบเดิมที่มีอยู่ หรือระบบที่มีการติดตั้งใหม่ทั้งหมด สิ่งที่ผู้ผลิตหุ่นยนต์โมบายต้องทำ มีดังต่อไปนี้
- วางระบบการเชื่อมต่อที่น่าเชื่อถือ เข้ากับมาตรฐานการสื่อสาร CAN หรือ CANopen เพื่อให้พวกเขาสามารถตรวจเช็คอุปกรณ์ของตน เช่น มอนิเตอร์สถานะและการทำงานของแบตเตอรี่
- ป้องกันระบบจากคลื่นแม่เหล็กไฟฟ้า (EMI) เนื่องจากมันสามารถสร้างความเสียหายให้กับอุปกรณ์อิเลคทรอนิกส์ ความเสี่ยงจากคลื่นแม่เหล็กไฟฟ้าสำคัญมาก โดยเฉพะในการรีโทรฟิตระบบเดิม เนื่องจากมีการติดตั้งอุปกรณ์ใหม่เข้าไป เช่น ติดตั้งแบตเตอรี่ไปชิดกับสายเคเบิลสื่อสาร ซึ่งส่งผลให้เกิดการรบกวนอย่างรุนแรงจากคลื่นแม่เหล็กไฟฟ้า
5 การเชื่อมต่อจากระยะไกลกับหุ่นยนต์โมบาย
ความสามารถในการเข้าถึง หรือการเชื่อมต่อจากระยะไกล เข้ากับระบบคอนโทรล สามารถทำให้ผู้จำหน่ายหุ่นยนต์โมบาย หรือวิศวกร สามารถทำการแก้ไขปัญหาส่วนใหญ่ที่หน้างาน โดยไม่ต้องเดินทางเข้าไซต์งาน
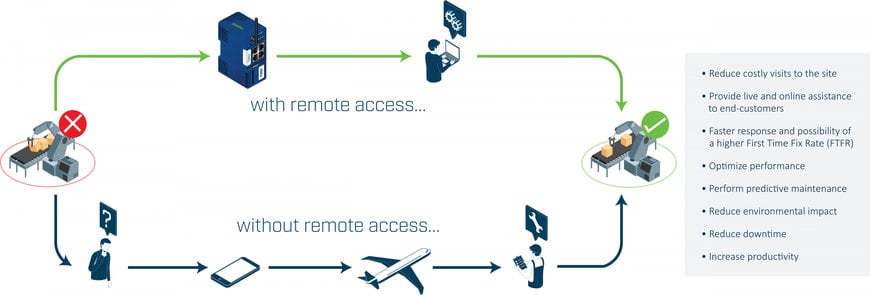
ประโยชน์ต่างๆ ของการเข้าถึงจากระยะไกล
ความท้าทายคือ การสร้างโซลูชั่นการเชื่อมต่อจากระยะไกล ที่สามารถถ่วงดุลระหว่างความต้องการของฝ่าย IT กับฝ่ายวิศวกร หรือผู้จำหน่าย
ฝ่าย IT ต้องการมั่นใจว่า ระบบเน็ตเวิร์คจะยังคงทำงานได้เสถียร น่าเชื่อถือ และถูกต้องครบถ้วน ผลที่ตามมาคือ โซลูชั่นการเข้าถึงจากระยะไกล ควรจะประกอบด้วยมาตรการความปลอดภัยดังต่อไปนี้
- ใช้การเชื่อมต่อภายนอก (outbound connections) แทนการเชื่อมต่อภายใน (inbound connections) เพื่อลดผลกระทบต่อไฟร์วอลล์ให้เหลือน้อยที่สุด
- แยกส่วนของทราฟฟิกที่เกี่ยวข้อง ออกจากส่วนของเน็ตเวิร์คทั้งหมด
- เข้ารหัสเพื่อป้องกันทราฟฟิกทั้งหมด เพื่อให้มั่นใจว่ามันเป็นความลับและมีความถูกต้อง
- มั่นใจว่าผู้จำหน่ายทำงานสอดคล้อง หรือเป็นผู้ได้รับการรับรองตามมาตรฐานความปลอดภัยที่เกี่ยวข้อง เช่น ISO 27001
- มั่นใจว่าซัพพลายเออร์ผ่านการตรวจสอบ (audit) มาตรฐานความปลอดภัยตามระยะเวลาที่กำหนด
ไม่ว่าวิศวกร หรือผู้จำหน่าย ก็ต้องการระบบที่ใช้งานง่ายและพึ่งพาได้ มันควรเป็นระบบที่ง่ายสำหรับผู้ใช้ ในการเชื่อมต่อไปยังหุ่นยนต์โมบายและเข้าถึงข้อมูลที่ต้องการ หากจำเป็นต้องเปลี่ยนแปลงการติดตั้ง มันควรจะง่ายและสะดวกในการปรับจำนวนหุ่นยนต์ตามที่ต้องการ หากสถานที่ติดตั้งหุ่นยนต์โมบาย อยู่คนละประเทศกับผู้จำหน่ายหรือวิศวกรผู้รับผิดชอบ อินฟาสตรักเจอร์ของระบบเน็ตเวิร์คจะต้องครอบคลุมเพียงพอ ต่อการเข้าถึงจากทุกแห่งในโลก
สรุป
จากที่กล่าวมาทั้งหมด ผู้ผลิตหุ่นยนต์โมบายต้องแก้ปัญหาและความท้าทาย ด้านการสื่อสารและความปลอดภัยหลายๆ อย่างด้วยกัน พวกเขาจะต้องเซ็ตการเชื่อมต่อไวร์เลส ส่งข้อมูลไปยังเน็ตเวิร์คที่แตกต่างกัน และยังต้องสร้างระบบความปลอดภัย เชื่อมต่อกับระบบ CAN รวมถึงการเข้าถึงจากระยะไกลที่เสถียร และที่จะยุ่งยากขึ้นไปอีก คือ หลังการติดตั้งแต่ละครั้ง ผู้ผลิตจะต้องทำการประเมินซ้ำ เพื่อทบทวนและปรับเปลี่ยน เพื่อให้หุ่นยนต์โมบายตอบสนองความต้องการของไซต์งานอย่างแท้จริง
แนวปฏิบัติที่ดี เพื่อสร้างระบบสื่อสารสำหรับหุ่นยนต์โมบาย
ผู้ผลิตหุ่นยนต์โมบาย มักจะไม่ใช่ผู้เชี่ยวชาญด้านการสื่อสารและความปลอดภัย ผลตามมาคือ พวกเขาพบว่า มันเป็นงานที่สิ้นเปลืองเวลาและมีค่าใช้จ่ายแพง หากจะพยายามทดลองสร้างเทคโนโลยีการสื่อสารที่ต้องการด้วยตนเอง ในขณะที่การใช้โซลูชั่นจากผู้ให้บริการบุคคลที่ 3 ไม่เพียงแต่จะช่วยแก้ปัญหาด้านการสื่อสารที่มี แต่มันยังมีข้อดีด้านอื่นๆ อีกด้วย
โดยโซลูชั่นการสื่อสารที่ทันสมัย จะมีการออกแบบเป็นหน่วยย่อย หรือโมดูลลาร์ เพื่อให้ผู้ผลิตหุ่นยนต์โมบาย สามารถถอดผลิตภัณฑ์เน็ตเวิร์คหนึ่ง ที่ออกแบบสำหรับมาตรฐานหรือโปรโตคอลหนึ่ง แล้วทดแทนด้วยอีกผลิตภัณฑ์ ที่ออกแบบสำหรับมาตรฐานหรือโปรโตคอลที่แตกต่างกัน โดยไม่เกิดผลกระทบต่อส่วนอื่นๆของหุ่นยนต์ ยกตัวอย่าง เช่น บลูทูธอาจเป็นมาตรฐานไวร์เลสที่เหมาะสมที่สุดสำหรับการติดตั้งในที่หนึ่ง ในขณะที่ ระบบ Wi-Fi อาจให้ความครอบคลุมพื้นที่ได้ดีกว่าสำหรับการติดตั้งในอีกที่หนึ่ง ทำนองเดียวกัน ที่ไซต์งานหนึ่งอาจใช้โปรโตคอล PROFINET และ PROFIsafe แต่อีกทีหนึ่งอาจใช้โปรโตคอลและมาตรฐานความปลอดภัยอื่น ซึ่งในทั้งสองสถานการณ์ ผู้ผลิตหุ่นยนต์โมบายควรเลือกใช้ผลิตภัณฑ์การสื่อสาร ที่สามารถปรับเปลี่ยนเทคโนโลยีเน็ตเวิร์ค ให้ตอบสนองต่อความต้องการของผู้ใช้งาน โดยไม่ต้องแก้ไขการออกแบบด้านฮาร์ดแวร์ใดๆ
บทความโดย
Mark Crossley, Daniel Heinzler, Fredrik Brynolf และ Thomas Carlsson
