
www.engineering-thailand.com
17
'20
Written on Modified on
Ixxat CANnector – มีดพับสวิสสำหรับ CAN
ในตอนนี้ HMS Networks ได้เปิดตัว Ixxat® CANnector ซึ่งเป็นโซลูชันที่ยืดหยุ่นสำหรับการบันทึก การเชื่อมต่อ และการขยายเครือข่าย CAN เพื่อเสริมประสิทธิภาพของชุดผลิตภัณฑ์ CAN@net NT และ CANbridge NT ที่มีอยู่ให้ดียิ่งขึ้น CANnector จึงนำเสนออินเตอร์เฟซและฟังก์ชันเพิ่มเติม รวมถึงฟังก์ชันการบันทึกข้อมูลด้วย เนื่องจาก CANnector นั้นสามารถทำงานร่วมกับ CAN@net NT และ CANbridge NT ได้ จึงสามารถขยายการติดตั้งที่มีอยู่แล้วได้อย่างง่ายดาย
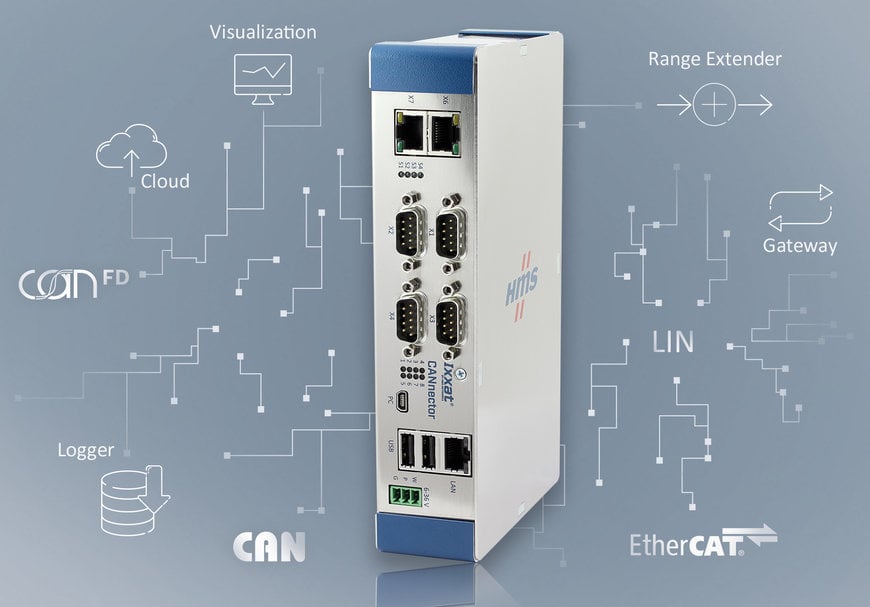
เครื่องบันทึก บริดจ์ และเครื่องขยายช่วงสัญญาณ - เอนกประสงค์และยืดหยุ่น
เช่นเดียวกับ CAN@net และ CANbridge NT, CANnector เป็นอุปกรณ์แบบสแตนด์อะโลน ซึ่งหมายความว่าอุปกรณ์นี้สามารถทำงานได้โดยไม่ต้องใช้ PC นอกเหนือจาก CANnector เวอร์ชันทั่วไปแล้ว ยังมีเวอร์ชันกำหนดค่าล่วงหน้าให้เลือกอีกสามรุ่น:
CANnector Range - เหมาะสำหรับการขยายช่วงสัญญาณ CAN(FD) แบบง่าย ๆ ผ่านอีเทอร์เน็ตหรือเป็นอินเตอร์เฟซ CAN ที่เชื่อมต่อกับ PC ผ่านอีเทอร์เน็ต
CANnector Bridge - บริดจ์/เกตเวย์ CAN(FD) ซึ่งทำงานตามเฟรมและสัญญาณ พร้อมด้วยฟังก์ชันการทำงานต่าง ๆ เช่น การจัดการข้อมูลจุดทศนิยมลอยตัวทางออนไลน์สำหรับระบบบัสทั้งหมด
CANnector Log - เครื่องบันทึกที่มีทริกเกอร์และบัฟเฟอร์วงแหวน รวมถึงโหมดสลีปที่ใช้พลังงานต่ำพร้อมด้วยการปลุกเครื่องบน CAN(FD) สำหรับการบันทึกข้อมูล CAN(FD) ตามเฟรมหรือสัญญาณ
หลังจากแกะกล่องและเชื่อมต่อแล้ว ผู้ใช้ก็สามารถใช้งานทั้งสามเวอร์ชันนี้ได้ทันที เนื่องจากฮาร์ดแวร์พื้นฐานเหมือนกัน และฟังก์ชันต่าง ๆ ของ CANnector นั้นมีให้ตามการกำหนดค่าที่สามารถโหลดได้ CANnectors ทั้งหมดจึงสามารถกำหนดค่าใหม่เพื่อรวมฟังก์ชันการทำงานตามที่ผู้ใช้เลือกได้
มีประสิทธิภาพและประโยชน์ใช้งานหลากหลาย
แพลตฟอร์ม Linux ที่มีประสิทธิภาพช่วยให้ CANnector สามารถดำเนินการกับแอปพลิเคชันที่ซับซ้อนและการจัดการข้อมูลบนอุปกรณ์ได้โดยตรง การรองรับไฟล์คำอธิบายบัสยังช่วยให้สามารถดำเนินการเกี่ยวกับระดับสัญญาณได้
ด้วยการใช้ “Wake-up on CAN (การปลุกบน CAN)” และความเป็นไปได้ในการปิดฟังก์ชัน TX บนระบบบัสของ CAN ทำให้อุปกรณ์สามารถใช้ในแอปพลิเคชันที่ไวต่อพลังงานและความปลอดภัยได้
CANnector สามารถใช้งานได้ในฮาร์ดแวร์หลายเวอร์ชัน ซึ่งจะมีความแตกต่างกันเฉพาะจำนวนอินเทอร์เฟซที่รองรับเท่านั้น จำนวนอินเทอร์เฟซสูงสุดคือ CAN (FD) แปด, LIN สอง, Digital IO สอง และอินเทอร์เฟซพ่วง EtherCAT หนึ่ง รวมทั้งอีเทอร์เน็ตและ USB มีการปรับใช้งานอินเทอร์เฟซพ่วง EtherCAT โดยใช้เทคโนโลยี Anybus® CompactCom จาก HMS จึงสามารถรองรับโปรโตคอลอีเทอร์เน็ตเชิงอุตสาหกรรมอื่น ๆ ในอนาคตได้เช่นกัน สายพ่วง USB เช่น Wi-Fi และ Bluetooth เป็นตัวเลือกที่สามารถใช้งานได้
การเชื่อมต่อ Cloud และ PLC
Ixxat CANnector มีฟังก์ชันเพิ่มเติมมากมายซึ่งช่วยในการใช้งานต่าง ๆ เช่น การแสดงผลข้อมูลด้วยภาพแบบไลฟ์และการจำลองรูปแบบโดยใช้อุปกรณ์มือถือ (สมาร์ทโฟนหรือแท็บเล็ต) ผ่าน Wi-Fi หรือการเชื่อมต่อบนคลาวด์ผ่าน OPC-UA, MQTT หรือผ่าน HMS Hub - ซึ่งเป็นโซลูชันสำหรับการเชื่อมต่อข้อมูลเชิงอุตสาหกรรมของ HMS
ด้วยการใช้อินเทอร์เฟซพ่วง EtherCAT ทำให้ CANnector สามารถเปิดใช้งานการเชื่อมต่อโดยตรงของเครือข่ายที่ใช้ CAN(FD) กับเครือข่ายอีเทอร์เน็ตเชิงอุตสาหกรรมหรือ PLC ได้
ฟังก์ชันทั้งหมดสามารถทำงานขนานกันบนอุปกรณ์ CANnector ได้ เช่น การบันทึกข้อมูลสามารถดำเนินการควบคู่ไปกับการเชื่อมโยง CAN(FD) และการแสดงผลข้อมูลด้วยภาพบนอุปกรณ์มือถือ
การกำหนดค่าที่ง่ายดายด้วยการลากและวาง
HMS มีเครื่องมือ Windows ฟรีซึ่งช่วยให้สามารถกำหนดค่า CANnector ได้อย่างง่ายดาย ซึ่ง “การเชื่อมต่อ” ระหว่างต้นทางและเป้าหมายถูกสร้างขึ้นโดยใช้แนวคิดการลากและวาง ผู้ใช้สามารถนำเข้าคำอธิบายระบบบัส CAN(FD) เพื่อกำหนดค่าได้ ช่วงมาตรฐานของฟังก์ชันสามารถขยายได้โดยใช้การพัฒนาแบบบูรณาการและสภาพแวดล้อมการดีบัก และรหัส C-user หรือโมเดล Matlab/Simulink ซึ่งสามารถดำเนินการบนอุปกรณ์ได้โดยตรง
เรียนรู้เพิ่มเติมเกี่ยวกับ CANnector ได้ที่ www.ixxat.com

